SYMROP
Multi Robot Framework for Cooperation of Robots
| SYMROPとは | 概要 | フレームワーク | 無線基盤技術 | アプリケーション | デモ | About Us |
SYMROPとは
複数のワイヤレスロボットを協調動作させることを目的とする−マルチロボットフレームワーク SYMROP−
SYMROPは複数のロボットを協調動作させることを可能にさせるソフトウェアフレームワークとして,未踏プロジェクト2006上期において提案・開発が行われました.また,IPAX2007,Niiオープンハウス2007においてデモ発表を行いました.
概要
SYMROPにより,単体ロボットのプログラムは協調動作するプログラムとなります!
現在,複数のロボットを協調管理させることを可能とさせるソフトウェアの枠組みは存在しません.しかし,一台のロボットの発展が急速に進む昨今,同型のロボットを同時に複数使用することで作業速度の向上を図ることが重要となってきました.本プロジェクトでは,無線でつながれた複数の独立動作しているロボットを協調させ,目的を達成させるためのマルチロボットフレームワークを開発しました.また,本マルチロボットフレームワークに適した基盤無線通信技術も開発しました.このフレームワークを利用することで,プログラマは抽象度の高い命令を用いるだけで複数のロボットを協調動作させることが可能となります.行動するロボットの選出や,ロボットの行動内容は,ロボット間の通信により内部で解決します.
フレームワーク
フレームワーク構造
ユーザーはマルチロボットコマンドインターフェースを利用して協調動作を記述します.
マルチロボットコマンドインターフェース
下記のコマンドインターフェースを利用することで,単体行動が複数行動となります.
命令の拡張性
フレームワーク用通信ライブラリを利用することで,メッセージパッシング等の新たなマルチロボットコマンドインターフェースを容易に実装することが出来ます.
無線基盤技術
高速,低コストな無線基盤技術
本プロジェクトでは,無線通信の到達性の研究を行い,それに基づき独自の通信プロトコルを開発しました.これにより,高ロバストで低通信量なネットワークの形成が可能となりました.さらに,低スペックな組み込み機器に搭載することが可能となり,省電力性・低コストも実現しました.また,本プロジェクトは無線に省電力なZigbeeを用いています.これによりWiFiとの共存が可能となり,より透過的にマルチロボットコマンドを使用することが出来ます.
アプリケーション
マルチロボット管理ツール
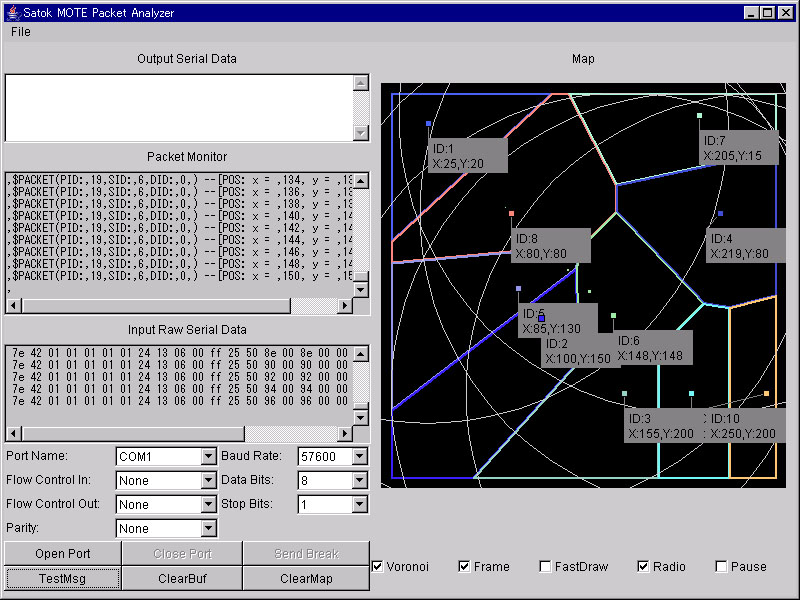 |
■SYMROPを利用したロボット管理ツール ・ロボットの位置表示機能 ・状態表示機能 ・通信範囲表示機能 ・収集したパケットの解析・表示 ・探索領域の表示 ・マルチコマンド命令送信機能 |
SYMROPデバイス
 |
■SYMROPを搭載した組み込み機器 ・マルチロボットコマンド実装部 ・ユーザー記述部 ・ロボットの行動制御 ・位置座標シミュレーション機能により容易なデバッグを実現 ・省リソース -Zigbee -RAM 4KB -ROM 128KB |
(詳細についてはお問い合わせください)
スクリーンショット
デモ〜SYMROPを利用した建物修復エージェント〜
 |
■目的 ■内容 |
Presentations
未踏ソフトウェア創造事業 2006年下期成果報告会News
Ttime 2004 Vol3: 東京大学総長賞 受賞2団体に聞く 成果と展望〜インタビュー:東京大学RoboTech部長 片岡慧〜[Watch Impress]マルチロボットフレームワーク
アンドロイドアプリ: 世界天気時計
Publications
複数のワイヤレスロボットを協調動作させる −マルチロボットフレームワークの開発−マルチメディア,分散,協調とモバイル(DICOMO2007)シンポジウム
マルチメディア,分散,協調とモバイル(DICOMO2006)シンポジウム
Multi Robot Framework for Task Allocation(複数ロボットのタスク割り当てのためのフレームワークの設計と実装) 片岡慧
About US
Copyright (C) 2006-2007 Satok Systems. Satoq. 東京大学大学院情報理工学系研究科コンピュータ科学専攻/国立情報学研究所
FB: 片岡慧/Satoshi Kataoka
連絡先: http://twitter.com/satok_